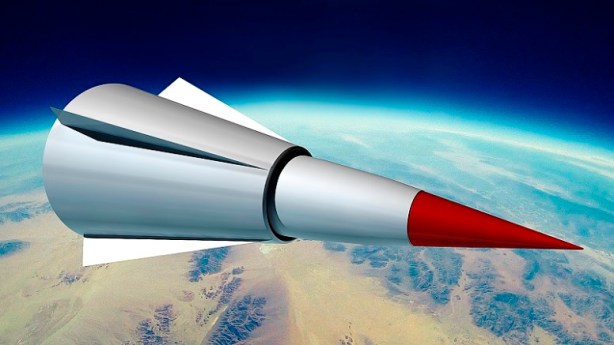
DF-ZF pour les chinois, WU-14 pour le Pentagone américain : ce sont les petits noms du nouveau planeur hypersonique chinois, capable de voyager entre Mach-5 et Mach-10. Pour être précis, il s’agit d’une charge militaire hypersonique, lancée à partir d’un missile balistique, ce que l’on appelle en anglais « high-speed maneuvering warhead » ou « hypersonic glider », et capable de percer tout système d’interception.
Pour être tout à fait concret, cela représente des vitesses de l’ordre de 10 000 km/h, même si la notion de véhicule hypersonique doit être modulée et précisée en tenant compte de l’altitude de l’engin (dans la haute atmosphère). Mais l’idée est d’être en position de frapper n’importe quelle cible sur la surface de la Terre en moins d’une heure. Ou de neutraliser un satellite en orbite basse.
Le missile propulsant le système DF-ZF a été tiré la semaine dernière à partir de la base de lancement de Wuzhai, en Chine centrale. Officiellement, il s’agit d’un tir d’essai « pour une mission scientifique » (!), qui fait d’ailleurs suite à un tir russe (le 22 avril dernier) d’essai d’un véhicule hypersonique analogue, à la frontière du Kazakhstan.
Le film ci-dessous illustre bien le concept.
Cette charge hypersonique est compatible avec plusieurs types de missiles balistiques chinois, comme le DF21 (moyenne portée) ou DF31 (ICBM ou missile balistique intercontinental). Le principe est de permettre au missile de lâcher le véhicule dans la stratosphère. Celui-ci retombe alors dans l’atmosphère, et voyage à haute vitesse. Bien que générant une trainée importante, cette solution permet de « planer » plus longtemps que si le véhicule était relâché dans l’espace, tout en minimisant le risque d’interception. En l’espèce, neutraliser un tel engin nécessiterait une arme à énergie dirigée (laser ou « railgun »). Bien que la trajectoire soit prévisible au début (car balistique), c’est donc bien la vitesse qui permet de percer les défenses ennemies. De plus, la trajectoire du DF-ZF est dite « up and down » : le véhicule est lâché, entre dans l’atmosphère, puis se rétablit et remonte avant de contrôler son altitude et sa vitesse, et de planer vers sa cible. Cette trajectoire semble erratique, et est très difficile à anticiper pour un système de défense.
La DARPA cherche également à développer un tel programme, et l’US Air Force anticipe une mise en service vers 2020 (notamment sur la base du X51 Waverider, ci-dessous).

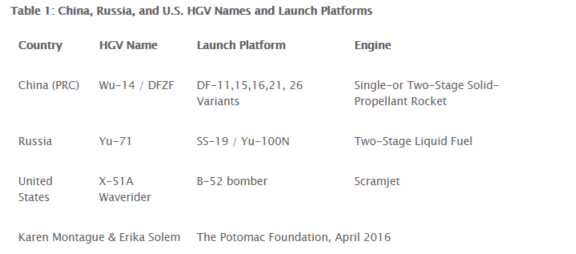
Comme le DF-ZF, le principe est également de « surfer » sur l’onde de choc créée par le véhicule lui-même (et créant une portance dite de compression). Cependant, à la différence du système chinois, le X51 repose sur une propulsion de type statoréacteur, sans aucune pièce mobile, mais qui est lancé à partir d’un bombardier B52. Le tableau ci-après présente les différents concepts.
Les russes ne sont pas en reste, avec notamment leur missile Zircon (ci-dessous) à base de combustible liquide, et capable de voler à 6000 km/h et tiré à partir d’un sous-marin de cinquième génération (classe Husky).

Il s’agit donc bien d’une course à l’hypervélocité. Au-delà de se doter de capacités de frappe nucléaire hypervéloce (comme le suggèrent de nombreux article un peu trop racoleurs sur Internet), la Chine cherche surtout à pouvoir montrer (et prouver) ses capacités à percer une défense antimissile régionale, comme le pensent les chercheurs de la Potomac Foundation.

La carte ci-dessus montre bien les enjeux dans la maîtrise de la région. Une arme hypersonique pourrait jouer un rôle soit dissuasif, soit offensif dans des zones comme Taiwan, ou la mer de Chine méridionale. A suivre, donc.