L’innovation navale de défense est décidément en plein boom. Après une semaine pendant laquelle j’ai pu parcourir l’excellent salon Euronaval 2018 et découvrir de véritables innovations sur les stands des grands, des moins grands, et des tout petits (notamment au sein de l’exposition Seannovation), un petit retour sur une nouvelle de début octobre, passée relativement inaperçue.
Le sujet ? Un projet chinois baptisé Guanlan (traduction approximative : « observer les grandes vagues ») qui vise à développer un satellite LIDAR capable de détecter les sous-marins en plongée. En premier lieu, et pour bien expliquer le concept, je me permets un petit rappel sur le LIDAR.

Pour faire simple, un LIDAR est un radar qui émet des impulsions à fréquences très élevées, dans le spectre visible ou infrarouge des ondes électromagnétiques, en utilisant généralement un laser. L’acronyme LIDAR signifie « light detection and ranging » (le « r » de radar signifiant quant à lui « radio »). Si l’on en parle beaucoup aujourd’hui (toutes les voitures autonomes utilisent un LIDAR – p.ex illustration ci-dessus), cette technologie est en réalité relativement ancienne. Elle a été développée dans le domaine spatial dans les années 70: sa première application était l’établissement d’une cartographie de la Lune lors de la mission Apollo 15.
Le LIDAR est également utilisé en archéologie, pour permettre de cartographier une zone en révélant ce qui se cache sous la surface. Et, bien entendu, sous l’eau.

Le projet Guanlan repose sur l’émission d’impulsion laser de différentes couleurs (donc de différentes fréquences) permettant de détecter des cibles à différentes profondeurs.

L’idée est de scanner une bande de 100km de large, tout en étant capable de focaliser le faisceau sur un rectangle de 1km de large. La question : comment détecter un sous-marin caché dans une zone d’une telle taille ?

L’équipe chinoise a donc dévoilé sa stratégie : coupler le LIDAR à un radar micro-ondes, capable de mesurer le mouvement de la surface de manière extrêmement précise. Le radar recherche ainsi les perturbations de la surface de l’eau qui pourraient témoigner de la présence d’un sous-marin immergé, afin de pouvoir focaliser le faisceau laser sur l’emplacement de la cible présumée.
Le faisceau se focalisera sur la thermocline, c’est-à-dire la couche dans laquelle on observe une inflexion brutale de la température, c’est à dire la frontière entre une masse d’eau froide, profonde et une masse d’eau superficielle plus chaude. Cette zone est généralement exploitée par les sous-marins afin d’éviter la détection (les ondes sonar se propageant différemment en fonction de la thermique sous-marine).
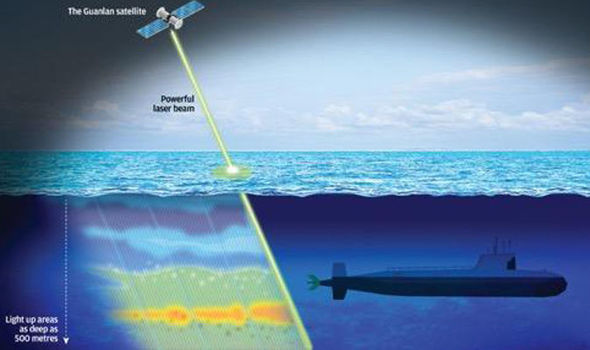
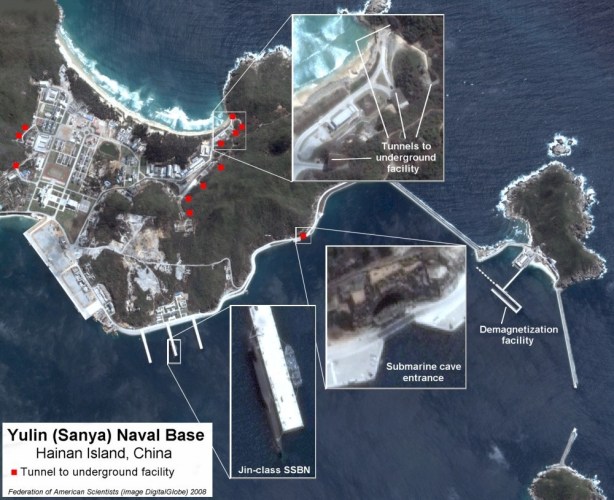
Les chinois annoncent une détection théorique jusqu’à une profondeur de 500m. Le satellite serait en cours de développement (comme à l’accoutumée, il faut prendre les déclarations chinoises avec une certaine prudence) par plus de 20 instituts chinois disséminés sur le territoire. L’institut responsable du projet serait le Pilot National Laboratory for Marine Science and Technology situé à Qingdao (sud-est de la Chine).
Maintenant, une certaine prudence s’impose, surtout si l’on considère que cette technologie a déjà été examinée dans un tel contexte, notamment mais non exclusivement par la DARPA (voir par exemple le Deep Sea Operations Program) avec des résultats mitigés . Il conviendra également de se poser la question de la sensibilité aux conditions de surface et de mer, ou à la présence d’organismes vivants comme les bancs de poissons. Quid également de la turbidité de l’eau, ou de la présence de nuages (puisque le laser est déporté en orbite)… Enfin, les LIDAR peuvent être diffractés, notamment lorsqu’ils traversent des milieux de températures ou de salinité différents – les expérimentations réalisés par les Etats-Unis ou la Russie n’ont pas été concluants au-delà de 200 m de fond. Alors même si le Laser semble développé par le très sérieux institut Xian Institute of Optics and Precision Mechanics Institute, percer la mer par 500m de fond semble très complexe, voire impossible.

En tout cas, encore une nouvelle annonce provenant de la Chine et destinée à démontrer le sérieux de la volonté du pays à s’imposer comme une superpuissance technologique militaire comme en témoigne (mais ce sera pour un nouvel article) le projet Deep Blue Brain destiné à développer un ordinateur exaflopique (1000 fois plus puissant que le plus puissant superordinateur actuel) avant 2020.