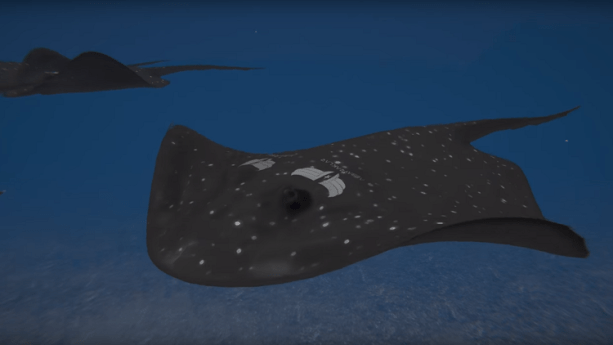
Le titre peut faire sourire, mais la nouvelle est bien sérieuse. C’est la société turque Albayraklar (son site web n’est malheureusement pas traduit en anglais et je ne parle pas le turc donc je ne peux pas vous en dire grand chose) qui a dévoilé une vidéo montrant un essaim de drones sous-marins comparables à des raies manta, évoluant sous l’eau et approchant d’autres poissons, jusqu’au moment où ils détectent la présence d’un porte-avions, se faufilent sous sa coque et font détoner leurs charges explosives. Voici le film (ci-dessous).
Science-fiction ? Invention délirante. Eh bien en fait non. Au-delà de l’aspect un peu kitsch de la vidéo, il s’agit bien d’un projet sérieux. Car l’intérêt du biomimétisme, et dans ce cas particulier d’imiter la raie, c’est de s’inspirer des caractéristiques uniques de sa propulsion. A la différence des requins ou autres poissons osseux, la raie se propulse par un mouvement unique de ses ailes, qui lui confère plusieurs capacités. En premier lieu, la stabilité sans avoir besoin de propulseur, ni de stabilisateurs. Et donc, par conséquence, une grande discrétion sous l’eau : pas de bruit, pas de signature sonar. Ce mode de propulsion par déformation et ondulation des ailes (à l’aide de trois moteurs intégrés dans le robot) lui confère également une grande endurance (12h à une vitesse de 5,5 nœuds). On trouve également deux caméras lui permettant de transmettre une image (voire, à terme, de faire de la reconnaissance automatique).

Le robot – de son petit nom Wattozz (a priori une adaptation du mot turc pour « raie ») possède une structure interne en titane et aluminium ; il est recouvert d’une couche de matériau absorbant afin de rendre le métal invisible au sonar, et dispose d’ailerons en silicone. Il comporte aussi des petits électro-aimants qui lui permettent, une fois sa cible repérée, de s’y fixer. Il peut également se poser sur le fond sous-marin, en attente de sa cible. Sa taille n’est pas précisée, mais si l’on en croit la vidéo, il fonctionne par essaim, ce qui signifie qu’il n’est pas suffisamment grand pour infliger les dommages nécessaire à sa cible, à lui seul.

Comment est-il contrôlé ? C’est une bonne question à laquelle je ne suis pas parvenu à trouver une réponse convaincante. On parle d’ondes sonores sous-marines cryptées, j’imagine qu’il s’agit là d’une formulation pour le canal acoustique sous-marin (ASM) – un mode de communication connu, efficace mais complexe car le milieu sous-marin n’est pas isocélère, et que la propagation du son varie en fonction de la température, la pression hydrostatique ou même la salinité. Cela semble néanmoins être une bonne solution, mais qui requiert un compromis entre robustesse du signal et efficacité du système de transmission. Cependant, je ne suis pas un spécialiste.
Ce n’est d’ailleurs pas la seule initiative de ce genre. On peut par exemple citer le robot Manta de la société Evologic, ou le MantaDroid de la NUSde Singapour (ci-dessous).
Mais c’est en tout cas le seul projet biomimétique militaire de ce type. Il est d’ailleurs si bien intégré dans son environnement biologique, que pour lui éviter de se faire dévorer par des prédateurs, la société Albayraklar a décidé de doter le Wattozz d’un système d’autoprotection par ultrason afin de décourager tout requin qui serait un peu trop gourmand.
Au-delà de l’aspect original, il s’agit bien de biomimétisme appliqué au monde de la défense. Car la propulsion de la raie est bien plus efficace – en termes de vitesse, de discrétion, d’énergie – que celle conférée par une hélice classique.
La nature est donc une superbe source d’inspiration pour les ingénieurs – ainsi, la marine américaine s’est inspirée des nageoires pectorales des poissons pour développer des robots sous-marins coopératifs (« finned bioinspired unmanned underwater vehicles ») en vue de conduire des missions d’exploration en zone littorale ou au plus près des côtes.

Dans de tels environnements, la turbidité de l’eau, la présence de nombreux courants et d’obstacles ne permettent pas l’emploi de drones sous-marins classiques. En ce cas, la propulsion par nageoires pectorales à très basse vitesse permet une manœuvrabilité inaccessible par des techniques conventionnelles. L’US Navy a ainsi développé WANDA (oui, c’est un acronyme pour Wrasse-inspired Agile Near-shore Deformable-fin Automaton !!!), un drone sous-marin portable capable de se déplacer à 2 nœuds, ou de résister à des courants de 2 nœuds.
On n’arrête pas le progrès, surtout quand il s’inspire de 4 milliards d’années d’ingénierie appliquée, l’Evolution.