Quel fil couper ? le rouge ou le bleu ? De « on a retrouvé la 7e compagnie » à « Die Hard » en passant par « l’arme fatale », la scène récurrente du film d’action consiste a couper délicatement le fil qui relie la bombe au détonateur. Compte tenu du résultat, l’idée d’utiliser un robot à cette fin ne semble pas complètement stupide (!). Histoire de pouvoir regarder cela de loin…
Sauf que les manipulations effectuées par un robot classiques sont plutôt grossières. On est loin des doigts de fée, et donc, le plus souvent, l’opération de désamorçage ou de levée de doute consiste à faire exploser, classiquement par un canon à air comprimé, le bagage suspect.
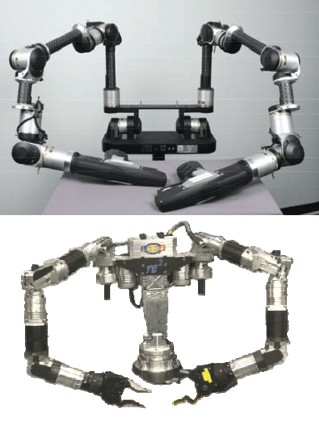
Pour réaliser des manipulations plus… subtiles, la société RE2 robotics (Resquared) a développé une nouvelle gamme de robots, baptisée HDMS pour Highly Dexterous Manipulation System (système de manipulation à haute dextérité). Il s’agit d’une plate-forme de manipulation destinée à être connectée à un socle mobile, et muni de deux pinces à 16 degrés de liberté.

Outre l’extrême précision et mobilité des bras manipulateurs, le système comprend un mode de contrôle très évolué appelé Imitative Controller, supposé fournir un moyen de contrôler intuitivement les pinces du robot.
La vidéo ci-dessous montre l’efficacité de cette technologie, avec notamment l’ouverture d’un cadenas… en introduisant délicatement une clé dans la serrure. Mais outre sa dextérité, le robot peut soulever des charges de 55kg !
Ce contrôleur permet à l’opérateur de jouer le rôle d’un marionnettiste, avec une position proche de celle adoptée par le manipulateur robotisé, des poignées ergonomiques loin des manettes de type « jeu vidéo », et un design très étudié du manipulateur. A titre d’exemple, les concepteurs ont porté un soin particulier à étudier la longueur des parties articulées pour ne pas générer de fatigue chez l’utilisateur.
Enfin, le retour d’effort vers l’utilisateur est utilisé par divers moyens : lumineux, sonore et évidemment haptique. Grâce à ces techniques, l’opérateur peut découpler les mouvements des deux bras, ce qui permet notamment de réaliser les prouesses présentées dans la vidéo.

La société américaine Resquared, basée à Pittsburgh, est une spin-off de l’Université Carnegie Mellon, université de référence en robotique. Elle vient donc de livrer 2 robots HDMS 551s1 à l’US Army, pour des missions de déminage. Reste à connaître le prix de l’engin, que le P-DG de Resquared, Jorgen Pedersen, présente comme particulièrement attractif.