Le biomimétisme est un domaine en plein essor, et nous avons déjà parlé dans ce blog de l’inspiration de la nature dans différents domaines (camouflage, mobilité…). Cette fois-ci, un petit éclairage sur le programme OFFSET de la célèbre DARPA (rappel : Defense Advanced Projects Research Agency).
Là où il y a programme militaire, il y a acronyme et celui-ci (OFFSET, donc) signifie OFFensive Swarm-Enabled Tactics, soit tactiques offensives en essaim. La robotique en essaim, c’est un serpent de mer (pour rester dans la métaphore biologique); depuis les années 1990, de nombreux chercheurs et instituts s’inspirent de la nature et du comportement en essaim des oiseaux et des insectes pour imaginer des modes de travail collaboratifs pour des robots.

Car un essaim, c’est un système multi-agents en mouvement, un système complexe capable de comportements émergents et adaptés. A la différence d’un système classique (un vecteur, une mission), un essaim semble capable de prendre des décisions complexes et coordonnées dans un environnement non structuré. On parle d’auto-organisation, un processus par lequel de multiples décisions individuelles entraînent un comportement au niveau du groupe.

Prenons l’exemple d’un essaim d’insectes sociaux (fourmis, criquets…). Chaque individu possède des capacités de mouvement et de préhension limitée, l’ensemble de l’essaim étant quant à lui capable d’édifier des structures complexes. Autre exemple : les poissons ou oiseaux capables d’échapper à des prédateurs en utilisant des tactiques d’évitement tournoyantes complexes, sans que la trajectoire ne soit définie à l’avance, et chaque membre de l’essaim se fondant sur le comportement de ses voisins immédiats.
L’idée de la robotique en essaim, c’est donc de développer des algorithmes adaptés à des centaines ou des milliers de robots simples, chacun disposant de fonctions et de capacités de base et d’une connaissance limitée du monde et de ses voisins, afin de développer un comportement collectif résultant de la combinaison des actions individuelles.

Dans le programme OFFSET, la DARPA s’intéresse au combat urbain et vise à utiliser des techniques innovantes en essaim pour établir et maintenir une supériorité opérationnelle dans cet environnement. Car l’exploration d’un théâtre d’opérations en zone urbaine est complexe : l’environnement est imprévisible, compliqué (occlusion, multiples chemins, découpage vertical de l’espace). Une stratégie de type essaim permettrait d’avoir un réseau de capteurs distribués et dispersés, une combinaison des effecteurs, et une distance opérationnelle accrue. L’idée dans le programme est d’employer environ 250 éléments autonomes et hétérogènes au sein de l’essaim, dans une zone équivalant à 8 blocs urbains (rappelons que nous sommes aux USA et que leurs villes sont conçues avec Minecraft – juste pour plaisanter), et pour une durée moyenne de mission de 6 heures.

La logique est présentée dans le schéma ci-dessous : les individus sont munis d’algorithmes de base (ainsi SLAM signifie Simultaneous Location & Mapping, cartographie et localisation simultanées). Des missions de plus haut niveau sont définies (les primitives), et le système multi-agents doit lui montrer l’emploi de tactiques (comme donner l’assaut à un bâtiment).

Pour ce faire (et comme présenté dans la vidéo ci-après), l’agence cherche à développer un environnement interactif de type jeu vidéo permettant à des opérateurs humains de juger de la pertinence des tactiques de l’essaim observées. En parallèle, la DARPA souhaite disposer d’une plate-forme de test physique permettant d’évaluer les individus autonomes et de définir une architecture de contrôle.
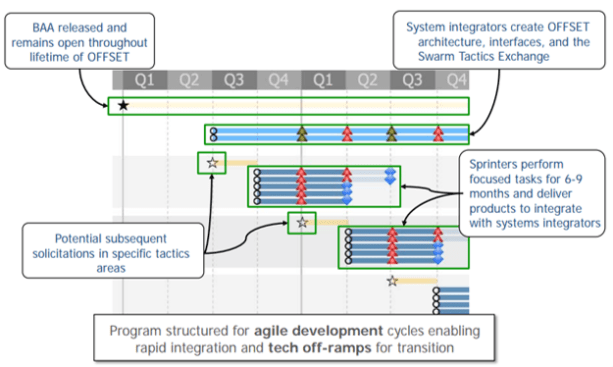
Dans sa forme, le projet est dynamique et itératif et utilise la méthode agile: tous les 6 mois, la DARPA organise un « Sprint » – donc une session de prototypage rapide – sur l’une des thématiques d’intérêt : autonomie de l’essaim, tactiques de l’essaim, interaction essaim/humain, environnement virtuel et plate-forme de test physique.

En parallèle, l’agence peut décider de déclencher un « sprint » sur une thématique ad hoc, à n’importe quel moment. Le schéma ci-après présente l’organisation du projet.
Le projet est innovant dans le fond et la forme, même si c’est encore une fois l’alliance de groupes industriels « classiques » qui rafle la mise, la phase 1 du contrat ayant été notifiée à Raytheon BBN Technologies et Northrop Grumman, les acteurs moins classiques se voyant intervenir lors des sprints. Presque innovant, donc…