Le biomimétisme (pour faire simple, l’inspiration du vivant pour tirer parti des solutions et inventions produites par la nature) n’a décidément pas fini de nous étonner. On connaissait déjà les « winglets » des avions inspirées des rémiges des rapaces, le fantassin-gecko (voir cet article), ou encore la gourde « magique » inspirée de la carapace du scarabée de Namibie. Voici maintenant la truffe artificielle pour la détection d’explosifs et de stupéfiants.

Des chercheurs de l’institut américain NIST (National Institute for Standards & Technology) en collaboration avec la FDA et le MIT se sont ainsi inspiré de la truffe du labrador, qu’ils ont recréée en 3D. Anecdotique ? Pas vraiment. Car les chiens ont une capacité remarquable de détection olfactive. Evidemment sans commune mesure avec l’olfaction humaine, la capacité de détection d’un chien est remarquable : sa sensibilité est comparable aux meilleurs détecteurs industriels, mais elle est surtout instantanée alors qu’un détecteur artificiel doit réaliser la collecte d’échantillons, le traitement du signal, son analyse, sur plusieurs cycles. L’odorat du chien permet ainsi de détecter des traces de nitroglycérine présentes à un rapport de concentration de 0.5 ppb (partie par milliard) soit 0.5 microgrammes par litre !
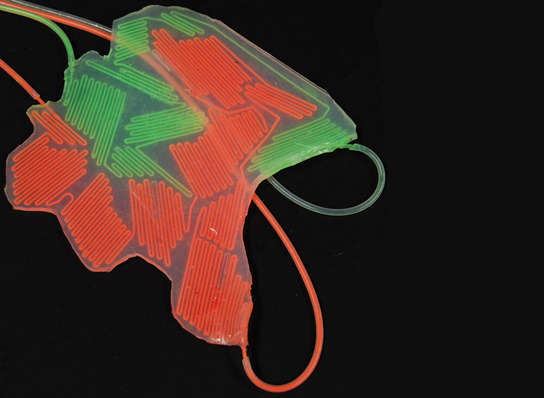
La question était de savoir si cette détection était uniquement due à une caractéristique des quelques 300 millions de cellules olfactives du chien, ou si la forme de la truffe en elle-même participait à cette performance. Les chercheurs ont ainsi montré que l’efficacité de la détection résidait dans le fait que le chien est un détecteur actif de substances : c’est un « analyseur aérodynamique » qui fait entrer l’air par des petites inspirations et expirations très rapides ; la géométrie de la truffe génère alors des turbulences aérodynamiques qui optimisent la détection des substances par les cellules olfactives. Cela peut être observé dans un dispositif appelé chambre de Schlieren, et qui permet de visualiser les flux d’air et leur évolution.

Par rapport à une simple inhalation, le mécanisme de « reniflement rapide » est ainsi 4 fois plus efficace. Les chercheurs ont donc réalisé des impressions 3D (sur une gamme d’imprimantes différentes) de « truffes artificielles » modélisées à partir d’un labrador de type « golden retriever ».
Ils ont ensuite équipé un détecteur d’explosif de type robot renifleur de cette truffe artificielle. Et les résultats sont édifiants. Avec une stratégie de reniflement inspirée de celle du chien (des inhalations et expirations rapides), le détecteur, à 4cm de la source, est 16 fois plus efficace que le détecteur « nu » et jusqu’à 18 fois plus efficace à 20cm de la source.

La vidéo ci-après permet de bien visualiser le flux d’air à l’entrée des « narines ».
Evidemment, les chercheurs n’ont pas dans l’idée de doter les robots de nez artificiels de labradors. Mais cette découverte peut permettre d’orienter les futurs développements de robots détecteurs, à la fois en termes de géométrie du capteur que de stratégie de direction des flux d’air. Car un robot détecteur se fatigue moins qu’un chien renifleur, et surtout ne nécessite pas une longue période de dressage. A défaut de vous rapporter votre journal…