Assez régulièrement, dans ce blog, je reprends ce sujet qui ne cesse de progresser : la fabrication additive. Non pas parce que ce serait à la mode, mais parce que les applications dans le domaine de la défense se multiplient et surtout, deviennent de plus en plus opérationnelles. Je vais, dans cet article, vous parler de deux sujets : drones de combat et nouvelles versions d’armes de poings, imprimables chez soi (!).
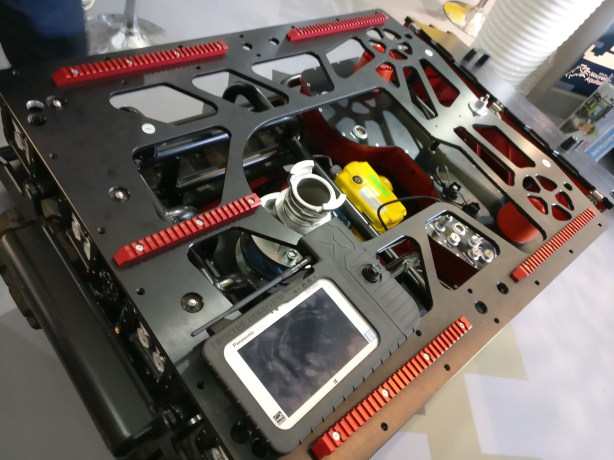
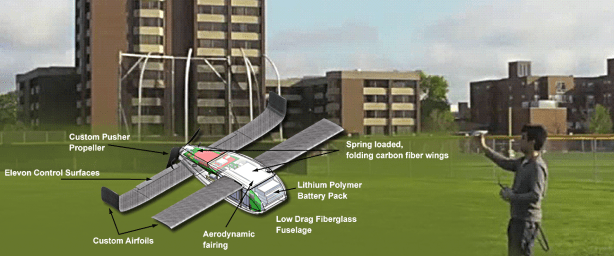
Commençons par l’opération appelée « Ripper Lab », faisant référence au surnom du 7e régiment des US Marines, à l’origine de l’expérimentation. Cette opération a consisté à déployer sur le terrain un laboratoire mobile de fabrication additive (un peu sur le modèle de la Rapid Equipping Force que j’ai déjà décrite dans cet article), au Moyen-Orient. L’opération a mobilisé 48 soldats et officiers (appartenant au Special Purpose Marine Air-Ground Task Force Crisis Response-Central Command), et a consisté à déployer, en soutien de l’Operation Inherent Resolve, des capacités d’impression de 25 drones légers de type Quadcopter, baptisés Nibblers.

Ce petit quadcopter, capable de voler pendant 20 à 25 minutes, a été modifié pour répondre aux exigences des US Marines. Le Nibbler est un drone très simple dont une grande partie est imprimée, le reste étant sourcé dans des composants grand public. Il est destiné à être employé pour des missions de reconnaissance, et d’identification d’autres drones hostiles. Il est aussi destiné à acheminer des ressources aux combattants déployés sur le terrain.

Ce n’est pas forcément plus économique en termes de coûts de développement, puisque le drone initial (quadcopter non modifié et acheté dans le commerce) coûte environ 500$, contre 2000$ pour le modèle Nibbler imprimé par les US Marines. Mais en termes de facilité d’utilisation, de déploiement et de maintenance (possibilité d’imprimer les pièces de rechange), l’opération semble intéressante. Le lab déployé utilisait différents types et tailles d’imprimantes 3D, permettant d’imprimer toutes les variétés nécessaires de composants.

Bien évidemment, ce que les soldats peuvent faire, leurs ennemis le peuvent également. On est bien là en face d’une technologie « nivelante », susceptible d’être employée par des factions combattantes hostiles, avec une certaine facilité compte tenu du coût d’équipement d’un « lab ». De plus, il est nécessaire de bien contrôler les aspects liés à la sécurité de l’information ; il est en effet facile de pirater un système, ou d’introduire des défauts qui ne se révéleront qu’après un certain nombre d’utilisations.
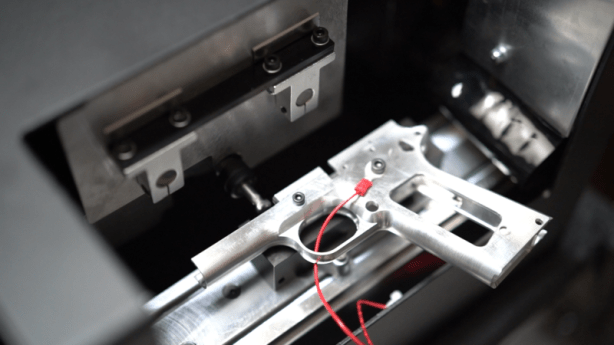
Cet aspect « nivelant » de la technologie, on le retrouve avec la suite de la saga du sulfureux Cody Wilson (dont nous avions déjà parlé, notamment dans cet article), fondateur de DD (Defense Distributed), société qui commercialise des machines de fabrication, et notamment des imprimantes 3D permettant la fabrication d’armes. DD a mis sur le marché une nouvelle mise à jour de son système, une fraiseuse automatique robotisée destinée à usiner des armes, et baptisée Ghost Gunner (voir cet article).

Le système était déjà utilisé pour fabriquer des fusils d’assaut AR-15 ; DD a désormais mis sur le marché les kits permettant de fabriquer chez soi des armes de poing, en l’occurrence des modèles Glock et le célèbre M1911. Et comme pour le AR-15, il s’agit de « ghost guns », armes fantômes puisque ne portant aucun numéro de série identifiable.
La société a trouvé quelques chemins tortueux dans les réglementations américaines pour que cette offre soit légale – en particulier, ils continuent à fabriquer des armes détectables, avec une composante métallique, puisqu’aux Etats-Unis, on peut fabriquer une arme, à condition qu’elle soit détectable dans un portique de type filtrage aéroport ( !) – c’est le décret « Undetectable Firearms Act ».

La nouvelle version du Ghost Gunner diffère considérablement de la précédente : des modifications dans la mécanique même du système ont été développées et testées pendant un an ; le système logiciel a été réécrit, la précision des axes de fraisage a été augmentée, etc. Le prix final de cette nouvelle version du Ghost Gunner n’a pas encore été fixé – la version précédente coûtait 1200$.
Tout ceci montre que l’utilisation militaire de l’impression 3D et des machines de fabrication utilisables par tout un chacun, chez soi, en vue de créer des armes, est en plein essor. Puisqu’il est pratiquement impossible de réguler le domaine, il faudra accepter que nos ennemis aient accès à ces capacités, avec des fichiers CAD 3D qui circuleront de toute façon sur Internet, quoi que fassent les gouvernements. Le génie est sorti de la lampe…