J’avais déjà écrit un article sur JFX3, le programme sur la réalité augmentée conduit par nos amis britanniques. Aujourd’hui, focus sur un programme Français ayant pour but de fournir une visualisation immersive et interactive de l’espace de bataille numérisé, et qui a fait l’objet de démonstrations remarquées lors d’Eurosatory et d’Euronaval : Battlespace Vista, développées par THALES (TCS, TRT et TRS).
Cela fait longtemps que THALES réfléchit sur la meilleure manière d’appréhender l’espace de bataille moderne, qui regroupe les champs physiques de mer, terre, air et espace, avec le champ immatériel de l’information. En effet, la numérisation de cet espace repose sur l’intégration des réseaux de communications tactiques (liaisons de données, messageries sur réseaux H/V/UHF) et des systèmes d’information opérationnels communicants. Si cette numérisation produit de puissants multiplicateurs de forces, elle appelle également de nouveaux modes de visualisation simplifiée d’une situation complexe intégrant terrain, forces, matériels, connectivité radio et empreinte capteurs, pour tirer le meilleur parti des opérations infovalorisées.
Ce n’est pas un problème trivial (mais la phrase précédente le laissait présager J). Il s’agit de passer d’une tenue de situation à une véritable compréhension de la situation, et ce sans surcharger la vision du chef, ni complexifier inutilement sa perception des opérations en cours. Autrement dit, ne pas faire « de la technologie pour la technologie ».
A cet égard, la démonstration capacitaire Battlespace Vista s’est révélée particulièrement illustrative, lors d’Eurosatory et d’Euronaval, en 2014. A l’occasion d’Eurosatory, THALES a présenté une démonstration fondée sur le scenario d’une mission d’appui rapproché numérisé au profit d’un SGTIA en Afghanistan. Il s’agissait d’une démonstration immersive, mêlant représentation innovante de l’espace de bataille, et manipulation en réalité immersive. Le résultat était impressionnant – même si l’on peut, à mon sens, améliorer la technologie d’immersivité utilisée. Mais cela n’était qu’une démonstration.

Ce qui m’a personnellement frappé, c’est la facilité pour un utilisateur de se placer au point de vue du chef en utilisant cette interface (lunettes 3D actives, joystick permettant de se positionner dans « l’espace informationnel »).

Au-delà, cette démonstration, positionnée en conduite des opérations au niveau d’un « Tactical Operations Center » et ses appuis interarmées interalliés, a permis d’illustrer trois constats.
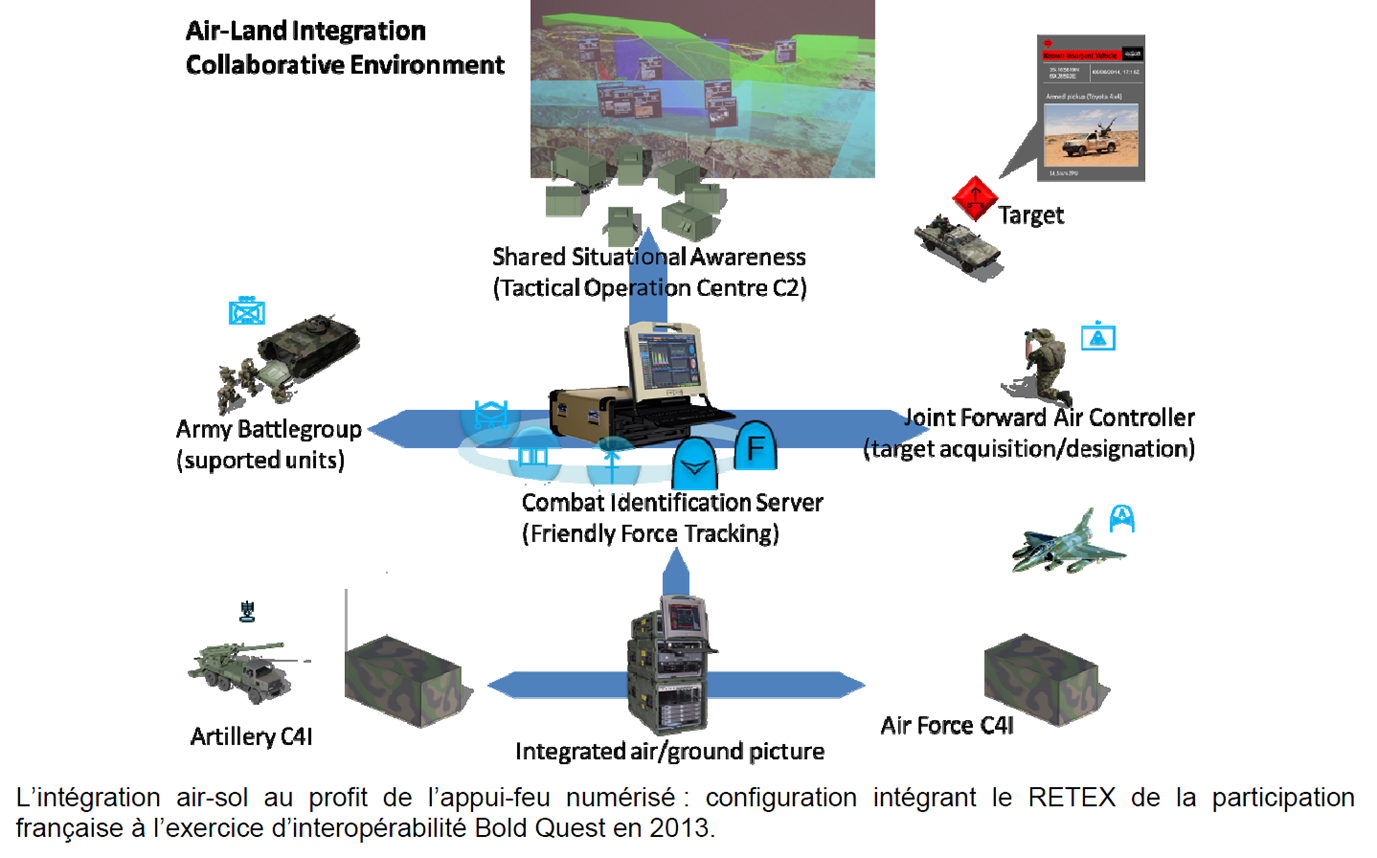
- En premier lieu, l’intégration air-sol aux niveaux interarmées, interarmes et interalliés est aujourd’hui une réalité de l’appui-feu numérisé : gestion partagée de la 3D entre artillerie (chaînes ATLAS, MARTHA..) et hélicoptères, avions ou drones, avec par exemple la définition de zones de tir réservées, partage de situation tactique air-sol et le suivi de forces amies entre moyens air,terre et forces spéciales, ou encore la faculté d’attribuer des cibles sans crainte de tir fratricide en minimisant les risques de dégâts collatéraux.
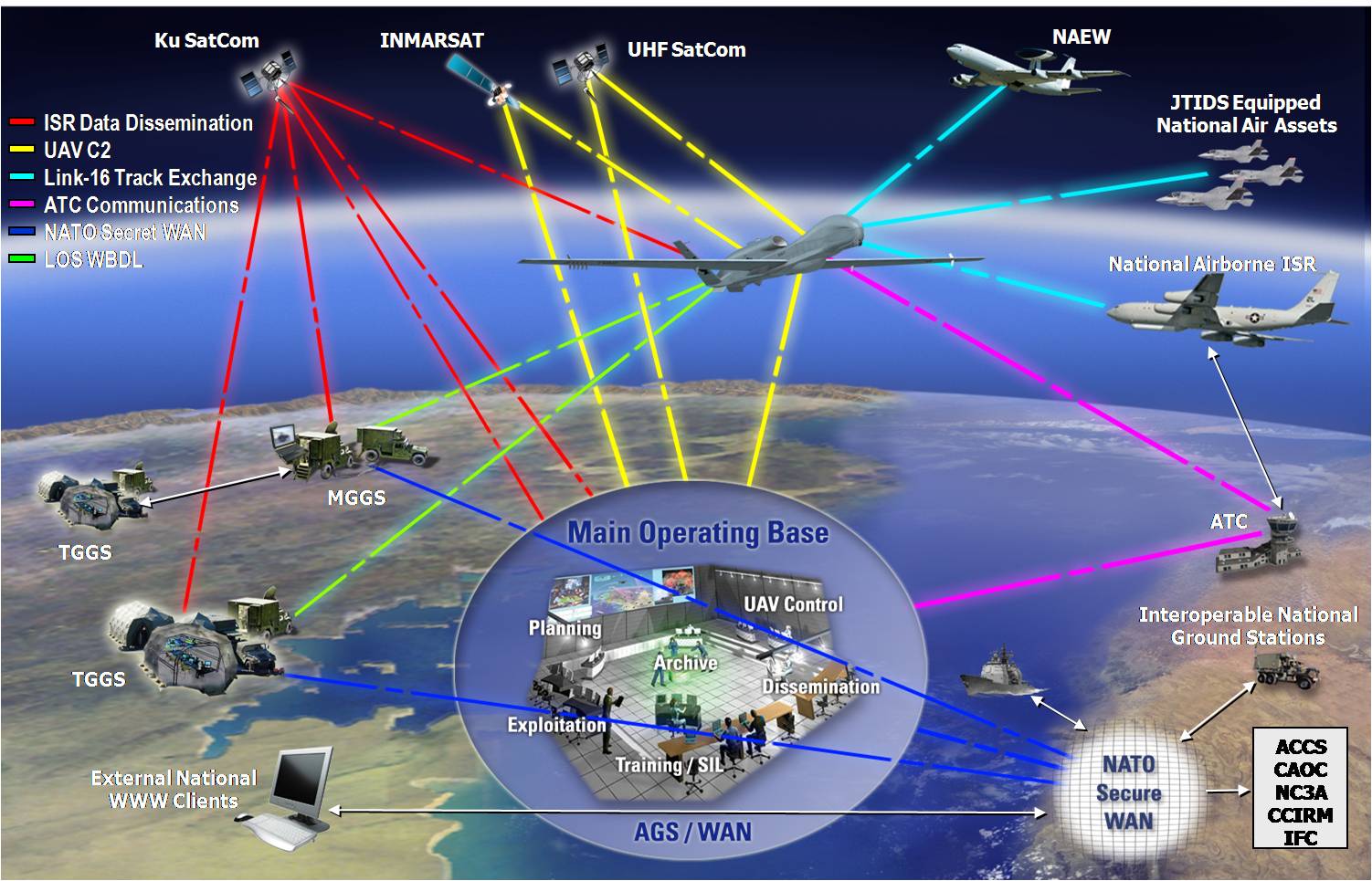
- La capacité spatiale se déploie au niveau opératif et devient essentielle à la conduite des opérations sur l’espace de bataille numérisé: elle permet la navigation, le positionnement, et la datation (navigation et frappes de précision),grâce au système Galileo et ses récepteurs embarqués, la tenue de situation spatiale consolidée (avec information des forces), l’observation (spatiocartes et systèmes d’information embarqués, analyse de site et évaluation des frappes), grâce à des stations de géographie ou d’imagerie déployées, et évidemment, l’intégration des télécommunications (mobilité, connectivité, qualité de service), grâce notamment aux systèmes Syracuse 3 (bande X) et Athena-Fidus (bande Ka), avec leurs terminaux fixes ou mobiles (VENUS).
- La numérisation des véhicules de combat et leur intégration en réseau autour de systèmes de missions est une nouvelle capacité des GTIA numérisés : elle permet d’insérer l’action du GTIA dans ses appuis interarmes et interarmées, synchroniser la manœuvre et les effets, procéder à une allocation des rôles et des cibles avant et pendant l’engagement, capacité d’autoprotection : alerte immédiate et déclenchement automatisée de contre-mesures.

Une belle démonstration donc, et une expertise française incontestée dans ce domaine, qui devrait porter les couleurs de notre pays lors de l’exercice Bold Quest cette année (Bold Quest est un exercice interallié et interarmées d’expérimentation dans les missions d’identification, de coordination des feux, d’appui aérien et de cyber défense).