Nous avons l’habitude de beaucoup parler de drones dans le cadre de ce blog, car oui, les drones sont à la mode, et leur application au monde de la défense connaît un développement explosif. Dans ce paysage, peu de réelles nouveautés. Les drones multi-rotors se ressemblent tous, avec généralement une structure en carbone ou en aluminium, et une envergure relativement importante (particulièrement si l’on souhaite les emporter sur le terrain). Peu d’originalité donc, la plupart des fabricants se concentrant essentiellement sur les systèmes de guidage, de planification de mission, ou sur la charge utile. Et ces drones sont fragiles, ce qui limite leur utilisation dans un contexte opérationnel exigeant.
L’innovation que propose DIODON, jeune société toulousaine créée en mars 2017 (après tout de même deux ans de recherche et développement de ses fondateurs – nous y reviendrons), c’est de modifier la structure même du drone afin de le rendre tout-terrain.

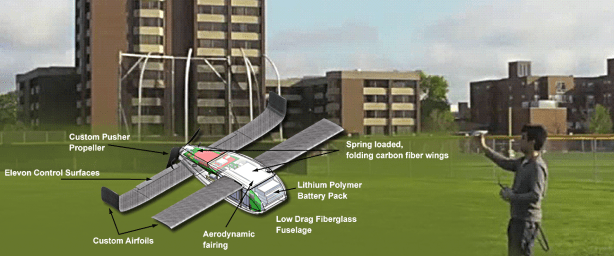
Leur technologie permet en effet de développer des drones aériens multi-rotors à structures gonflables. A l’origine, c’est l’inspiration du Kite-Surf, hobby de l’un des fondateurs, qui a permis d’imaginer le concept : un drone qui se déploie en quelques secondes, par un seul opérateur muni d’une pompe légère. Les bras du drone se gonflent très rapidement pour former une structure robuste et incassable.
Initialement, la société avait imaginé cette technologie de drone tout-terrain pour le grand public et en particulier les sportifs, mais elle a récemment pivoté, afin de réorienter son innovation vers le marché professionnel en visant notamment les secteurs de l’industrie, de la sécurité et de la défense. Un mouvement courageux, et pas si courant que cela, dans le domaine des startups où le grand public est généralement vu comme plus rémunérateur que le marché professionnel.

Malgré son apparente simplicité, ce concept nécessite une bonne dose d’ingénierie, car il s’agit de pouvoir garantir la précision de l’assemblage du drone, et notamment sa précision de pilotage, en utilisant des structures souples qui sont, par définition, difficiles à manier avec précision. D’où les deux ans de R&D nécessaires avant de fonder la société, et le dépôt d’un brevet sur le procédé.
Mais quels sont finalement les avantages d’un drone gonflable ? En premier lieu, la facilité de transport : le drone est léger, très compact lorsqu’il est dégonflé, et donc facilement transportable par un seul homme, en plus de son équipement usuel. Mais c’est aussi la robustesse : le drone peut atterrir sans dommage (il est son propre airbag), quel que soit le terrain : terrain accidenté, neige… ou même sur l’eau. Le DIODON est donc un drone ultra-portable, ultra-robuste et amphibie (il va sur l’eau comme sous la pluie), capable d’être déployé en quelques secondes dans toutes les conditions, mêmes les plus difficiles.

La start-up propose donc aux militaires et aux acteurs de la sécurité civile (pompiers, sauveteurs en montagne, forces de l’ordre) des solutions de reconnaissance et de surveillance en conditions difficiles. Pour atteindre ces clients exigeants, elle s’appuie sur une offre reposant sur la combinaison de différents vecteurs et charges utiles (voir le tableau ci-dessous).

Les charges utiles sont diverses : caméras Full HD, FLIR, Vision nocturne ou même IA embarquée (nous y reviendrons)… Chaque DIODON dispose de sa station sol dédiée, avec retour vidéo et position GPS, interface tactile et contrôle manuel, et lien crypté. La portée est de 10km ce qui est amplement suffisant pour une grande variété d’applications.

Dernière originalité de ce projet : les deux fondateurs sont en fait encore étudiants à l’Isae-Supaéro, et réussissent le prodige de développer cette activité en parallèle de leurs études. Chapeau. Voici un petit film réalisé à l’occasion du SOFINS, et qui présente la société.
La société DIODON (de son nom complet DIODON Drone Technology) souhaite étendre son offre à des applications SAR (Search & Rescue) en milieu alpin. En ce sens des démonstrations vont être organisées d’ici le début du mois de septembre dans des stations de ski des Pyrénées. Elle a participé (outre le SOFINS) au salon international de l’air et de l’espace du Bourget. Plusieurs régiments français et étrangers ont déjà évalué l’efficacité de la solution dans le cadre d’exercices en conditions réelles.

La société DIODON fait partie des sociétés labellisées dans le cadre du programme GENERATE du GICAT – nous présenterons bientôt d’autres sociétés labellisées. Quand je vous disais que la France n’a pas à rougir de sa base industrielle et technologique de défense…
Pour contacter DIODON, suivre ce lien. Pour tout renseignement sur GENERATE, voici le chemin.