
Oui, je sais, le jeu de mots est facile mais le projet ne l’est pas. Voici le GLMAV (pour Gun Launch Micro Air Vehicle), un concept innovant de drone miniature lancé…à partir d’un canon.
Ce concept est issu d’un financement ANR dans le cadre de l’appel à projets Concepts, Systèmes et Outils pour la Sécurité Globale (CSOSG). Le projet de recherche collaboratif a associé l’Institut franco-allemand de recherches de Saint-Louis (ISL), le CRAN (Université de Lorraine), l’unité mixte de recherche HEUDIASYC (Université de Technologie de Compiègne) du CNRS et la société SBG Systems SAS.
Le concept est original puisqu’il consiste à lancer, à partir d’un tube portable (10 kg) dédié, un projectile subsonique qui se transforme en drone miniature (MAV) à rotors coaxiaux contrarotatifs une fois arrivé au-dessus de la zone d’opérations. Le schéma ci-dessous illustre le principe du GLMAV :
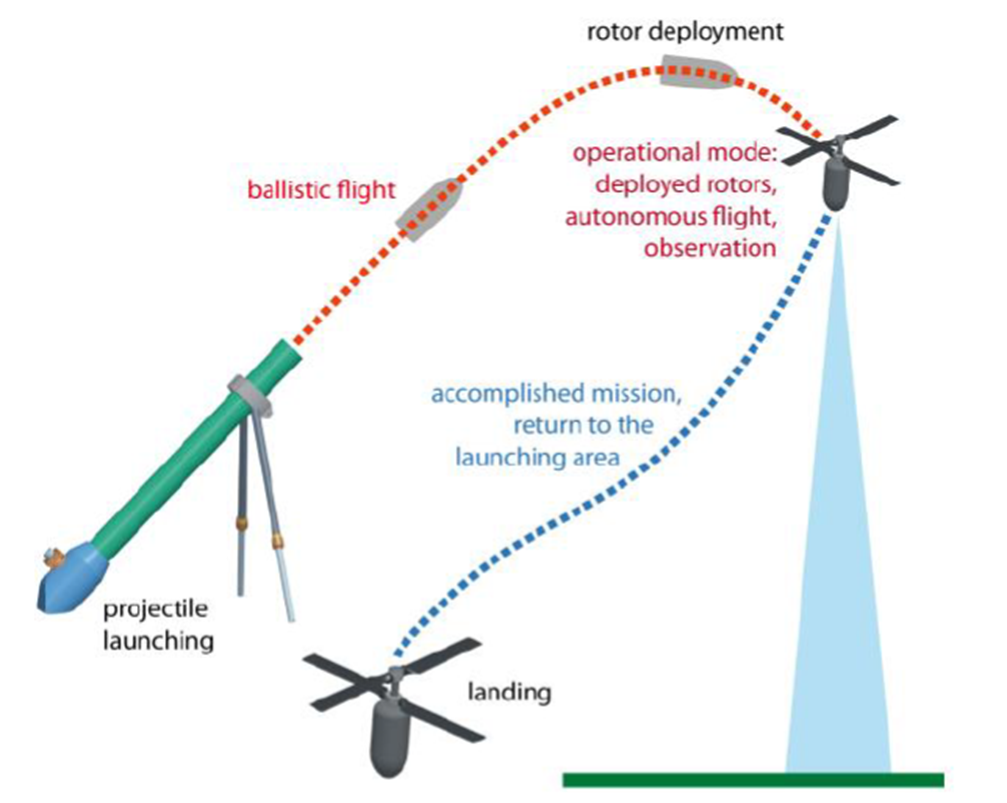
Ce concept procure de multiples avantages, en particulier en ce qui concerne le délai de mise en œuvre (le drone peut être très rapidement sur zone) et l’énergie nécessaire afin d’amener l’engin sur le site à observer, par rapport à un drone conventionnel, le poids de l’engin (1kg) ou encore la discrétion acoustique (le vol initial est silencieux) et visuelle (l’objet arrive comme un projectile, et est donc difficile à détecter visuellement).
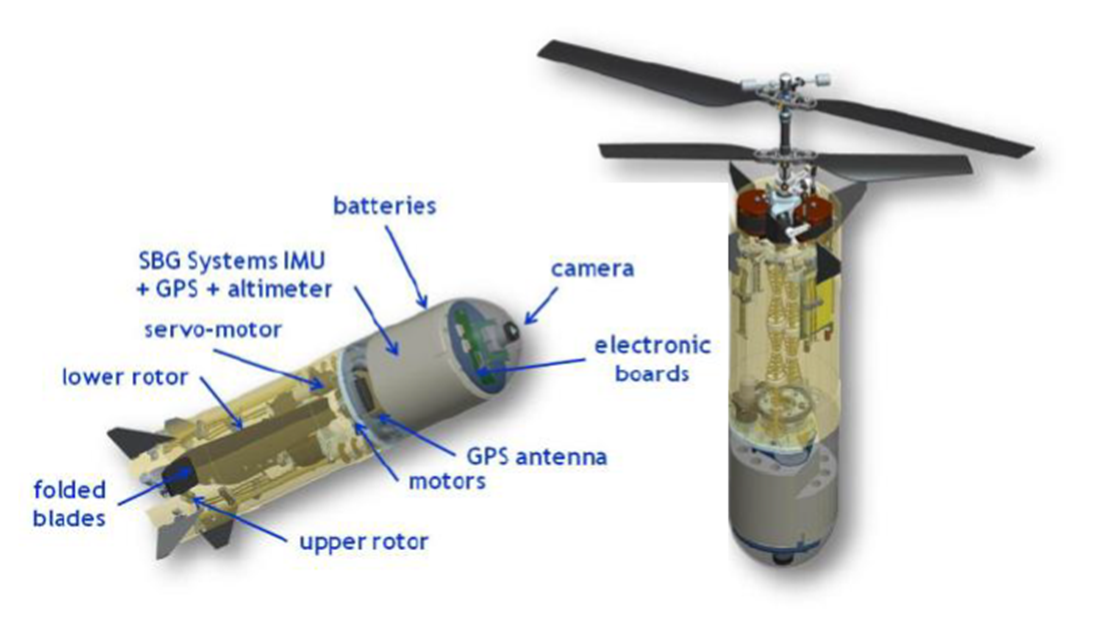
De plus, le drone possède une caméra capable de filmer dans deux directions différentes grâce à un prisme séparateur, et d’envoyer les images en temps réel (une suggestion du GIGN).

En revanche, les difficultés technologiques qui ont été rencontrées dans le projet étaient réelles et multiples :
- L’autonomie et le rayon d’action devaient être réalistes : le projet visait un rayon d’action de 500 mètres et une autonomie d’au moins 20 minutes. l’engin devient opérationnel à 100 m au-dessus de la zone à observer située à 100 m ou 500 m du lieu de lancement.
- Le drone devait être pourvu d’une certaine autonomie décisionnelle car le système doit pouvoir être opéré par un non-spécialiste
- Le principe de pales à charnières a posé des problèmes techniques
- Les rotors contrarotatifs devaient permettre de stabiliser l’appareil après la phase transitoire : une poussée d’environ 18 N est en effet nécessaire pour ralentir le GLMAV jusqu’à obtenir une vitesse de translation nulle
- Les interactions inter-rotors sont complexes, comme l’évoque le projet « L’appareil GLMAV comporte deux rotors coaxiaux contrarotatifs. Le rotor supérieur assure la sustentation de l’appareil tandis que le rotor inférieur assure l’anti-giration et sa manœuvrabilité longitudinale et latérale. La superposition des rotors conduit à des interactions de différentes natures entre les rotors qui dépendent du type de vol et qu’il y aura lieu d’étudier »
L’ISL a assuré la coordination des travaux du consortium pendant le projet, qui a également associé la DGA, le GIGN et MBDA. Les essais ont eu lieu en 2013 dans la région de Mulhouse, et se sont avérés concluants. Si le projet ANR est achevé, le développement du prototype doit encore être finalisé, il le sera par l’ISL sur fonds propres. Une vidéo des essais est visible sur cette page.

Un concept innovant, donc, d’ailleurs présenté au forum innovation 2014 de la DGA, et qui a également comme intérêt de mettre concrètement en relief des compétences critiques en balistique, détonique, architectures des munitions,… qui rentrent dans la catégorie des compétences rares, et donc menacées. Un groupe de travail, dirigé par Christian de Villemagne (directeur de l’ISL), vient d’ailleurs d’être mis en place sur ce sujet au sein de la commission R&T du GICAT – nous en parlerons dans un prochain article.
Images (C) ISL, ANR, HEUDIASYC, CRAN, SBG Systems, Ministère de la Défense
